昨天我們只有大致帶過ResNet的整體架構,內容基本上都是聚焦在殘差(Residual)架構上,今天我們會重新看一次ResNet模型的整體架構,並且利用Pytorch實戰一次看看!
昨天的內容中有提到下面的兩張圖,可是那時候並沒有深入講解圖要怎麼看,現在讓我們重新看一次: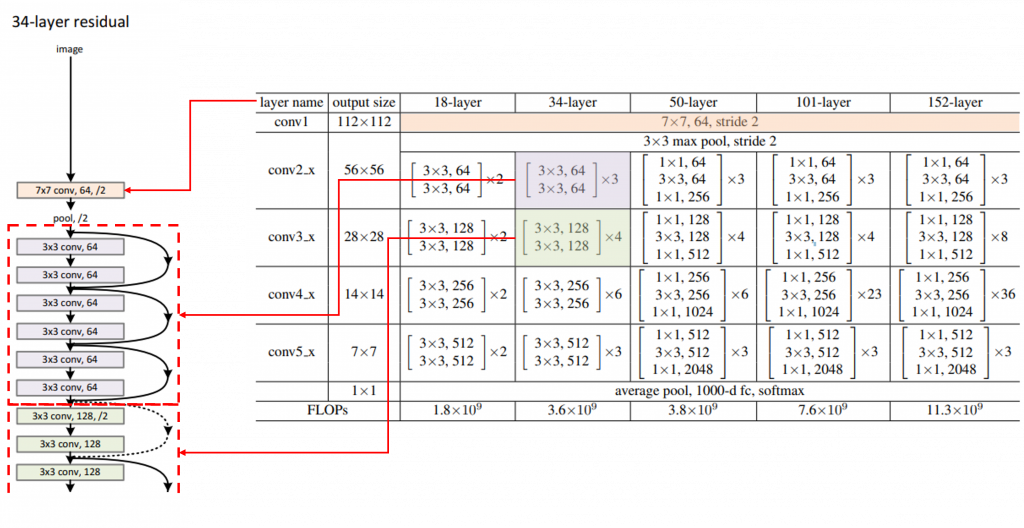
我們以ResNet-34為例,一個Residual Block結構就是表格中中括號框起來的部分,表格中的第一列(淡紫色)區塊對應的就是第一組Residual Block結構,有兩個捲積核大小為3x3的捲積層(輸入與輸出通道數量皆為64),這樣的結構總共會出現3次,接著就是第二列(淡綠色)區塊,對應的是第二組Residual Block結構,有兩個捲積核大小為3x3的捲積層(除了第一次的輸入輸出為(64,128)外,其餘輸入與輸出通道數量皆為128),這樣的結構總共會有4次,往後以此類推。
和VGG實戰一樣(https://ithelp.ithome.com.tw/articles/10332866),我們要建構一個ResNet模型的話,可以使用Pytorch提供的預訓練模型或是自己從頭開始。所以我們一樣分兩個區塊介紹。
import torch
import torch.nn as nn
import torchvision.models as models
# Load a pretrained ResNet-34 model
# pretrained_resnet50 = models.resnet34(pretrained=True)#有使用預訓練權重
pretrained_resnet34 = models.resnet34()#沒有使用預訓練權重
print(pretrained_resnet34)
BasicBlock這個class來實現ResNet中的Residual Block結構,可以看到每個Residual Block中都有兩組捲積層(這邊的捲積層泛指一個一般捲積層+一個批量歸一化層+一個激勵函數),搭配一個短路(shorttcut)連接,最後就是把這樣的殘差(Residual)訊號與短路(shortcut)訊號加在一起,就是一個Residual Block結構的輸出。self.downsample來實現。def _make_layer(self, block, out_channels, num_blocks, stride)按照論文規定的格式依序組合起所有的層。組合好之後就是一個完整的ResNet-34模型。import torch
import torch.nn as nn
# Basic block with two convolutional layers
class BasicBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channels)
self.downsample = nn.Sequential()
if stride != 1 or in_channels != out_channels:
self.downsample = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels),
)
def forward(self, x):
shortcut = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += shortcut
out = self.relu(out)
return out
# ResNet-34 architecture
class ResNet34(nn.Module):
def __init__(self, num_classes=1000):
super(ResNet34, self).__init__()
self.in_channels = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(BasicBlock, 64, 3, stride=1)
self.layer2 = self._make_layer(BasicBlock, 128, 4, stride=2)
self.layer3 = self._make_layer(BasicBlock, 256, 6, stride=2)
self.layer4 = self._make_layer(BasicBlock, 512, 3, stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512, num_classes)
def _make_layer(self, block, out_channels, num_blocks, stride):
layers = []
layers.append(block(self.in_channels, out_channels, stride))
self.in_channels = out_channels
for _ in range(1, num_blocks):
layers.append(block(out_channels, out_channels, stride=1))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
# Create a ResNet-34 model from scratch
resnet34 = ResNet34()
# Print the architecture of the custom ResNet-34 model
print(resnet34)
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
# Hyperparameters
batch_size = 64
learning_rate = 0.001
num_epochs = 2
# Data preprocessing and loading
transform = transforms.Compose([transforms.Resize((224,224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
train_dataset = torchvision.datasets.CIFAR10(root='./data', train=True, transform=transform, download=True)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True)
test_dataset = torchvision.datasets.CIFAR10(root='./data', train=False, transform=transform)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=batch_size, shuffle=False)
# Initialize the VGG model
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = ResNet34(10).to(device) #需要分類幾類就填幾類
# Loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
# Training loop
total_step = len(train_loader)
for epoch in range(num_epochs):
model.train()
for i, (images, labels) in enumerate(train_loader):
outputs = model(images.to(device))
loss = criterion(outputs, labels.to(device))
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i + 1) % 100 == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Step [{i+1}/{total_step}], Loss: {loss.item():.4f}')
# Evaluation
model.eval()
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
outputs = model(images.to(device))
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels.to(device)).sum().item()
print(f'Test Accuracy: {100 * correct / total}%')


 iThome鐵人賽
iThome鐵人賽